@CITY - Odometrie
Odometrie im urbanen Raum
Fördermittelgeber: Bundesministerium für Wirtschaft und Energie (BMWi)
Webseite: @CITY
Laufzeit: 2019-2021
Kooperationspartner: Continental AG
![]()
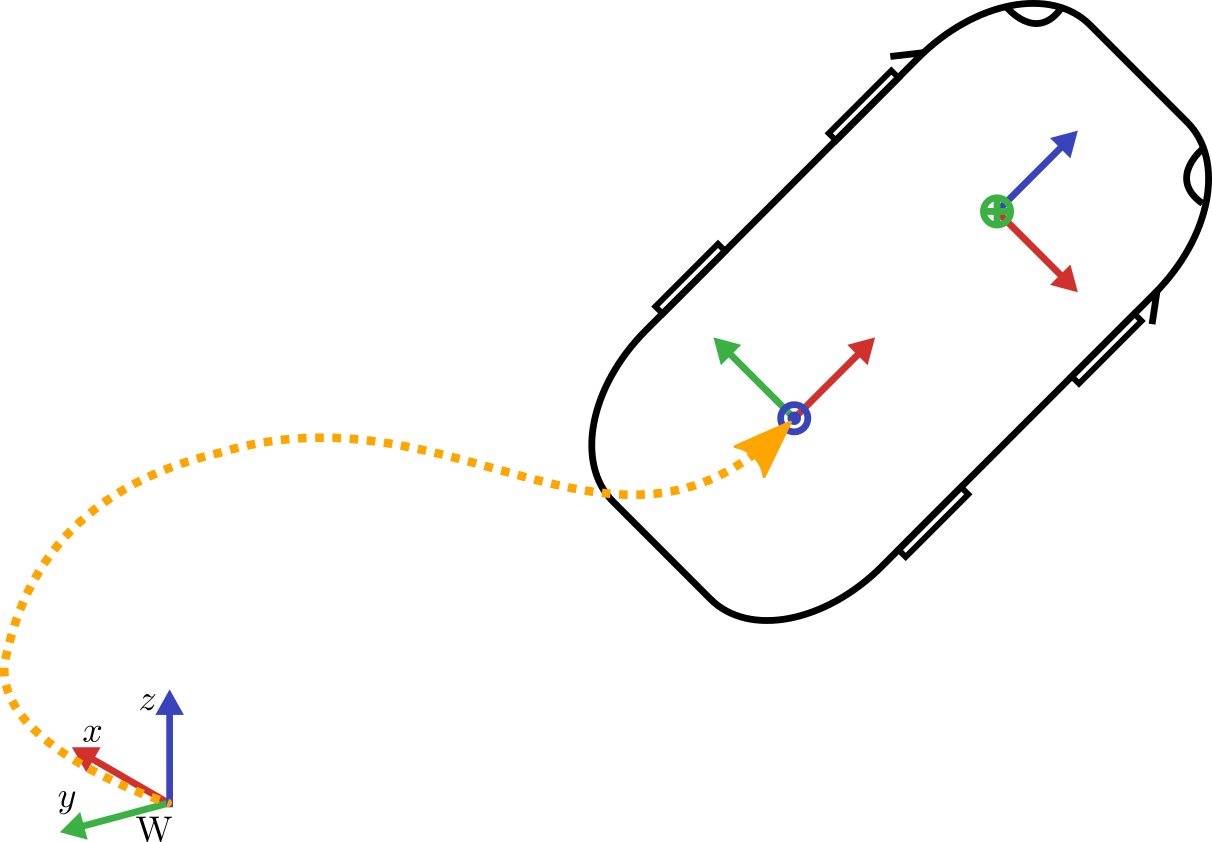
Ein wesentlicher Bestandteil im autonomen Fahren stellt eine präzise Odometrie des Fahrzeugs dar. Im Gegensatz zur absoluten Positionsbestimmung mittels GNSS-Verfahren berechnet die Odometrie die relative Bewegung des Fahrzeugs in Abhängigkeit vom Startpunkt. Die Position und Orientierung sowie die Geschwindigkeit des Fahrzeugs werden für diverse Algorithmen des autonomen Fahrens benötigt. Innerhalb dieses Projekts werden verschiedene Methoden untersucht über eine Multi-Sensor-Fusion die Odometrie des Fahrzeugs hochfrequent und sprungfrei zu bestimmen. Im Vordergrund steht die Nutzung einer inertialen Messeinheit (IMU) sowie der Bildfluss einer Kamera.
 Der finale Odometriealgorithmus verwendet die IMU sowie den Bildfluss einer Kamera. Außerdem werden Messungen des Lenkwinkels und der Fahrzeuggeschwindigkeit unter Anwendung bestimmter kinematischer Modelle benutzt. Sämtliche Sensorinformationen werden in einem Unscented Kalman Filter (UKF) zu einem finalen Odometrieergebnis fusioniert. Es findet eine lose Kopplung der Kamera- und IMU-Daten statt.
Der finale Odometriealgorithmus verwendet die IMU sowie den Bildfluss einer Kamera. Außerdem werden Messungen des Lenkwinkels und der Fahrzeuggeschwindigkeit unter Anwendung bestimmter kinematischer Modelle benutzt. Sämtliche Sensorinformationen werden in einem Unscented Kalman Filter (UKF) zu einem finalen Odometrieergebnis fusioniert. Es findet eine lose Kopplung der Kamera- und IMU-Daten statt.
Publikationen:
Filter publications: | |
|---|---|
| 2022 | |
| [3] | Visual-Inertial Odometry aided by Speed and Steering Angle Measurements (), In 25th International Conference on Information Fusion (FUSION), IEEE, 2022. |
| 2021 | |
| [2] | Visual-Multi-Sensor Odometry with Application in Autonomous Driving (), In 93rd IEEE Vehicular Technology Conference (VTC2021-Spring), IEEE, 2021. |
| 2020 | |
| [1] | Kalman Filter with Moving Reference for Jump-Free, Multi-Sensor Odometry with Application in Autonomous Driving (), In 23rd International Conference on Information Fusion (FUSION), IEEE, 2020. |
Aktuell sind 94 Gäste und keine Mitglieder online