SFB EASE - H1
SFB 1320: Everyday Activity Science and Engineering (EASE)
Funding: Deutsche Forschungsgemeinschaft (DFG)
Website: EASE
Project period: 2017-2025 (Phase 1&2)
Cooperation partner: BIPS - Statistical Methods for Causal Inference Research Group
![]()
People master everyday tasks with ease. They manipulate objects in their environment and can deal with incomplete information (e.g. instructions) and unfamiliar circumstances (e.g. a new object or tool). The EASE Collaborative Research Center examines how robotic agents can master manipulation tasks at the competence level of humans.
The subproject H1 examines how humans flexibly adapt their sensorimotor behavior to the variety of conditions and contexts being imposed by everyday scenarios. This adaptation extends over several levels, reaching from task conditions, over object and tool properties, to on-the-fly adjustments of sensorimotor parameters. Causal relations are essential for these adaptive properties.
H1: Sensorimotor and Causal Human Activity Models for Cognitive Architectures
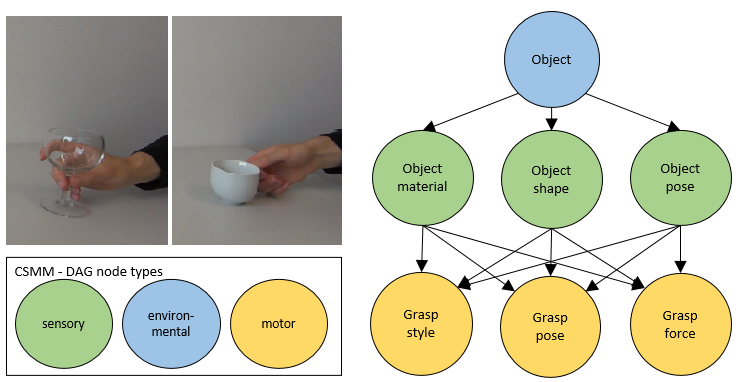
The goal of subproject H1 is to identify and model the causal structures and relations that underlie context-sensitive sensorimotor adaptation. To achieve this goal, we will investigate sensorimotor behavior in natural settings where the context determines the planning, adaptation and execution of the task. As a result we will develop suitable Causal Sensory-Motor Models (CSMMs) which are based on causal probabilistic graphs. CSMMs will model the execution of everyday tasks in a household context and will serve as a basis for the planning, execution, and prediction of arm and hand movements, and, on a higher level, action sequences. The structural dependencies and the functional relations incorporated in the CSMMs will facilitate learning and improve generalizability.
Publications:
Filter publications: | |
|---|---|
| 2025 | |
| [10] | Robot pouring: identifying causes of spillage and selecting alternative action parameters using probabilistic actual causation (), In Frontiers in Cognition, Frontiers Media SA, volume 4, 2025. |
| [9] | Robot Pouring: Modeling and Sim-to-Real Evaluation Using Causal Discovery (), In European Robotics Forum 2025 (Marco Huber, Alexander Verl, Werner Kraus, eds.), Springer Nature Switzerland, 2025. |
| [8] | Discovering the Causal Structure of Haptic Material Perception (), In Haptics: Understanding Touch; Technology and Systems; Applications and Interaction (Hiroyuki Kajimoto, Pedro Lopes, Claudio Pacchierotti, Cagatay Basdogan, Monica Gori, Betty Lemaire-Semail, Maud Marchal, eds.), Springer Nature Switzerland, 2025. |
| 2023 | |
| [7] | Representing (Dis)Similarities Between Prediction and Fixation Maps Using Intersection-over-Union Features (), In Proceedings of the 2023 Symposium on Eye Tracking Research and Applications, Association for Computing Machinery, 2023. |
| 2021 | |
| [6] | Object Manipulations in VR Show Task- and Object-Dependent Modulation of Motor Patterns (), In Proceedings of the 27th ACM Symposium on Virtual Reality Software and Technology, ACM, 2021. |
| 2020 | |
| [5] | From Human to Robot Everyday Activity (), In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. |
| [4] | Categorization of Contact Events as Intended or Unintended usingPre-Contact Kinematic Features (), In 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), 2020. |
| [3] | Pre-Contact Kinematic Features for the Categorization of Contact Events as Intended or Unintended (), In 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), 2020. |
| 2019 | |
| [2] | Adaptivity of End Effector Motor Control Under Different Sensory Conditions: Experiments with Humans in Virtual Reality and Robotic Applications (), In Frontiers in Robotics and AI, 2019. |
| 2018 | |
| [1] | Exploring Human Kinematic Control for Robotics Applications: The Role of Afferent Sensory Information in a Precision Task (), In IROS 2018: Workshop - Towards Robots that Exhibit Manipulation Intelligence, 2018. |
We have 141 guests and no members online